Robotics and Mechatronics Laboratory -ロボティクスメカトロニクス研究室-
Kanazawa University 金沢大学
Robot Motion Teaching Based on Human Motion Using Machine Learning(人の動作学修に基づくロボットの動作教示)
Precise assembly work with stiffness switching joint(組み立て作業のための可変剛性関節の設計と動作制御))
3D reconstruction using statistical shape model and RGB-D(RGB-D カメラと統計的形状モデルによる3次元形状復元)
Generating Training Data Using Composite Images for Food Recognition(食品認識のための合成画像を使用したトレーニングデータの生成)
Assembly Motion Strategy Using Deep Reinforcement Learning(深層強化学習を使用した組み立て作業の動作戦略)
Grasping Motion Strategy for Picking Using Machine Learning(機械学習を用いたピッキングのための把持動作戦略)
Development of robot hands for bin-picking(ピッキング用ロボットハンドの開発)
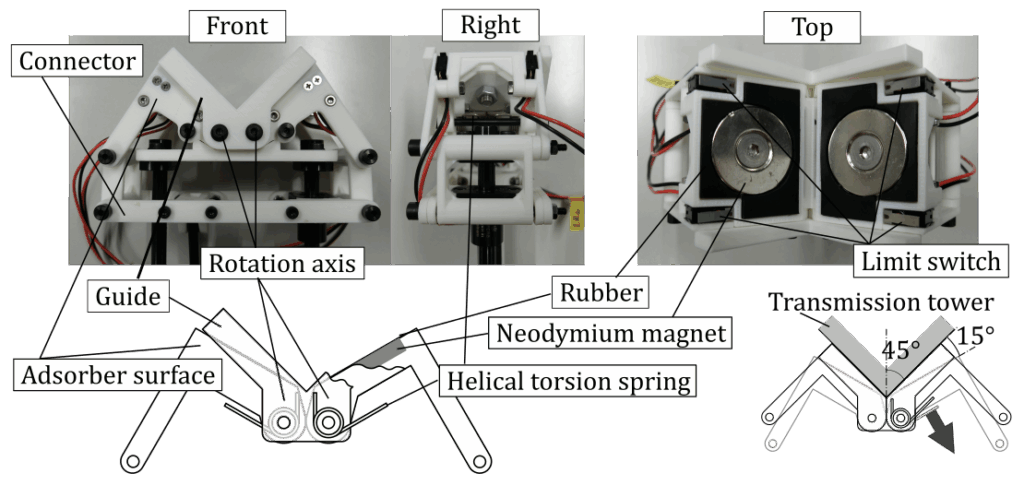
Development of climbing robot for transmission tower which is able to get over steps(階段を乗り越えることができる送電鉄塔用昇塔ロボットの開発)