Robotics and Mechatronics Laboratory -ロボティクスメカトロニクス研究室-
Kanazawa University 金沢大学
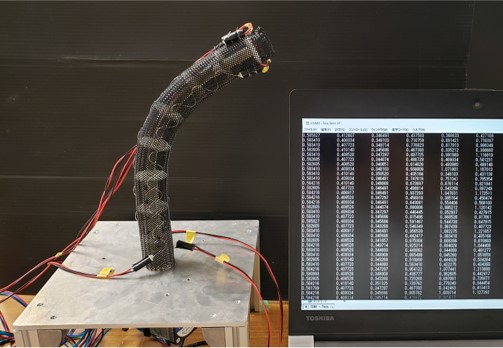
Development of a method to sense the posture of a flexible arm using optical fiber sensor(光ファイバセンサーを用いた柔軟アームの姿勢検出法の開発)
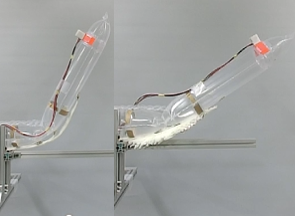
Development of Bridge Inspecting Arm with String Entangled in Inflatable Structure(紐の付着によるインフレータブルアームの剛性強化の研究)
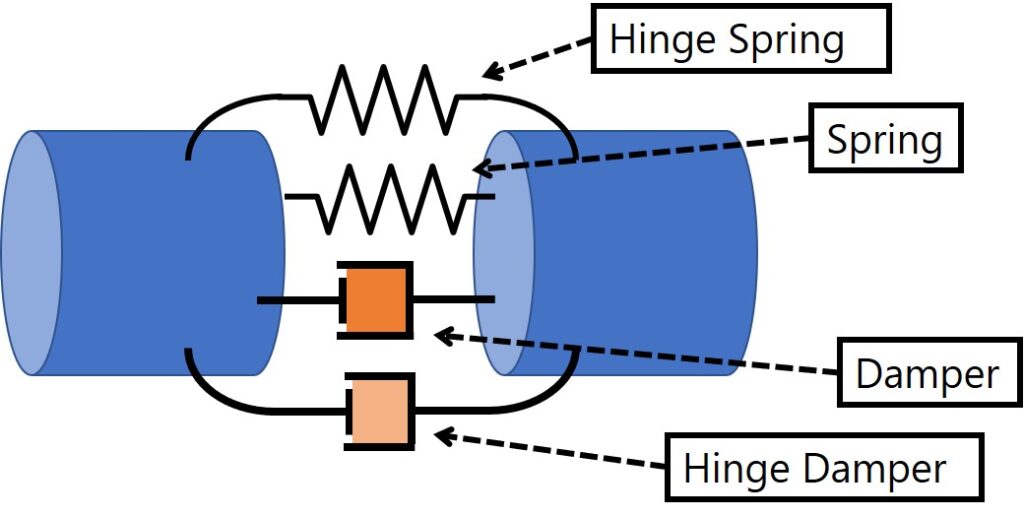
Rotary Joint Composed of Rotational Things and Skeletal Structure(回転物と骨格構造からなる回転関節の開発)
Development of soft fingers can be extended in the axial direction(軸方向に伸長かのうなソフトフィンガーの開発)
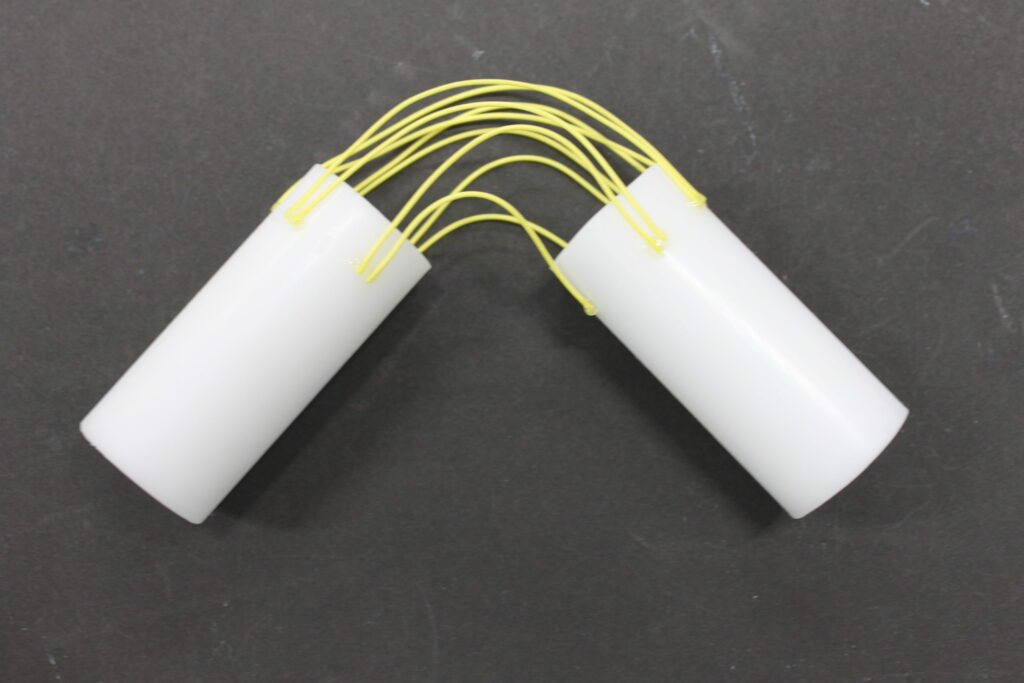
Development of manufacturing method for joint consisted of strings(紐からなる関節の製造方法の研究)