Robotics and Mechatronics Laboratory -ロボティクスメカトロニクス研究室-
Kanazawa University 金沢大学
Automatic cutting machine for gold leaves(金箔の自動裁断装置)
Crane monitoring system using pan-tilt stereo camera(クレーン用の衝突モニタリングシステム)
Navigation of a mobile robot using retro-reflective markers(再帰性反射マーカーによる移動ロボットのナビゲーション)
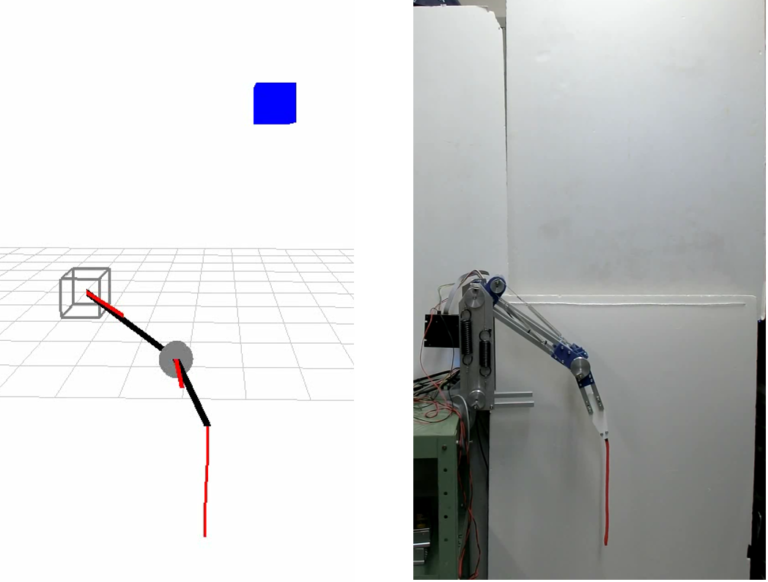
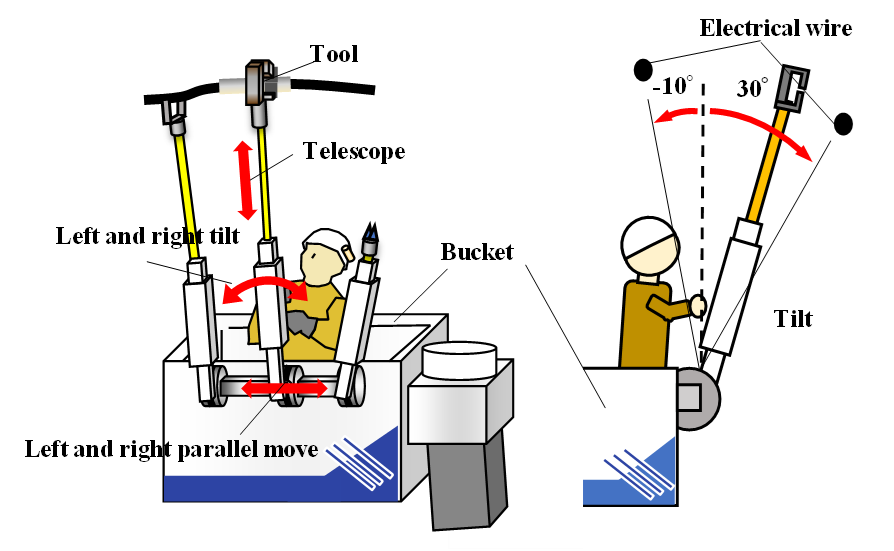
Assitive robotic arm for power line maintenance(配電作業用アシストアーム)
Spreading task of a towel by robot arms(ロボットによるタオルの展開作業)
Folding task of clothes by robot arms with some tools(道具を使ったロボットによる衣類の折り畳み作業)
Wearable handwriting input device(磁気を利用した手書き入力デバイス)